Research
Research prepares students to be problem-solvers and innovators while also supporting the department's crosscutting areas of excellence.
Both undergraduate and graduate students have the opportunity to do research alongside expert computer science faculty in the areas of distributed embedded systems, machine learning, data mining, and software engineering. Or, you can choose the interdisciplinary route, doing research beside faculty in various engineering disciplines. The computer science department at Missouri S&T makes use of both its own computer learning center (CLC) as well as university CLCs. The CLC contains a mix of Linux and Windows computing platform. Class sizes are kept small to facilitate student and faculty interactions. Research laboratories provide support for both undergraduate and graduate students.
Explore our research areas
Research Laboratories
Funded Research Spotlight
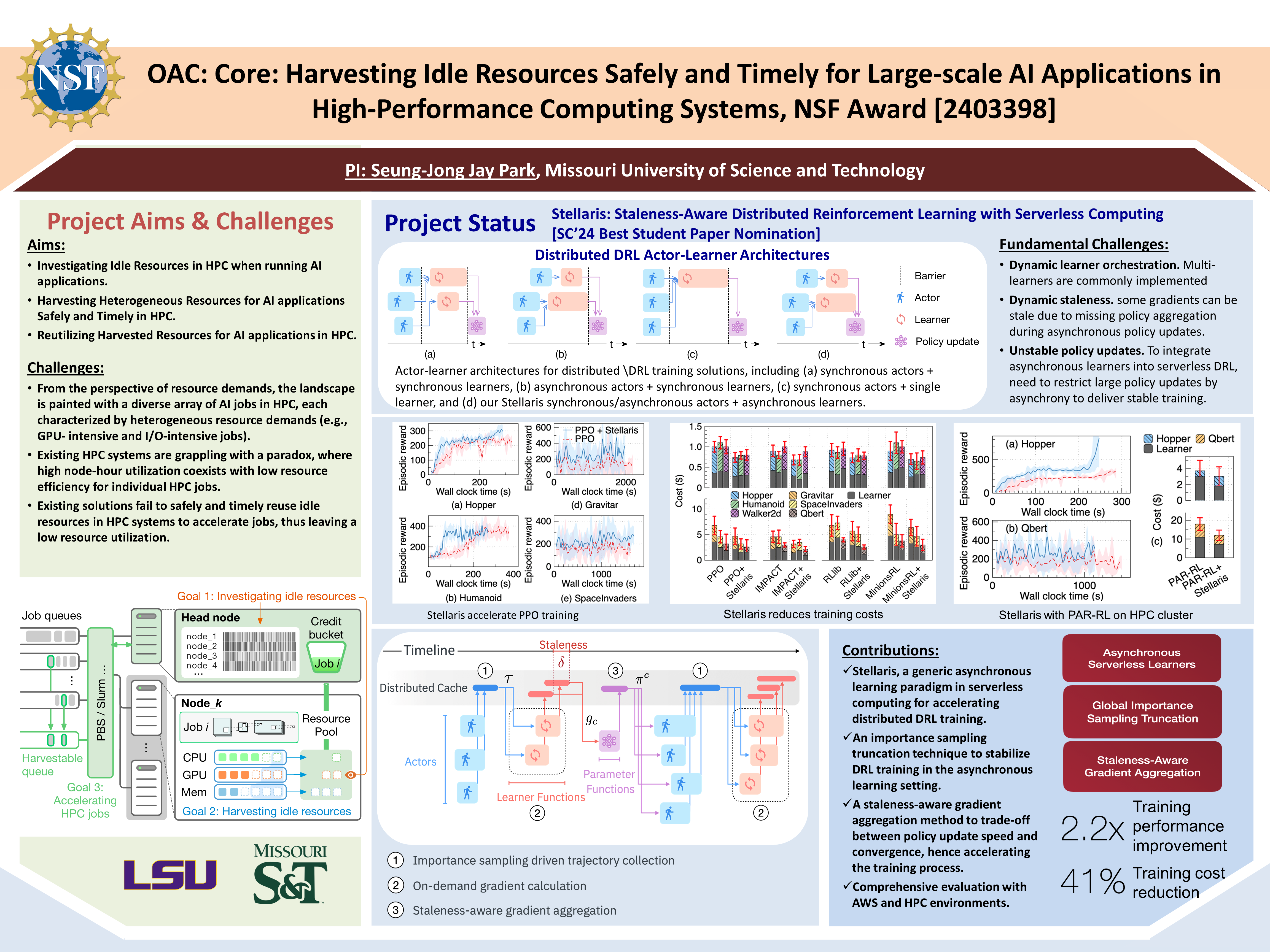
Harvesting Idle Resources Safely and Timely for Large-scale AI Applications in High-Performance Computing Systems
Agency: NSF Award #2403398
The proposed research project aims include investigating idle resources in HPC when running AI applications, harvesting Heterogeneous resources for AI applications safely and timely in HPC and reutilize harvested resources for AI applications in HPC.
Research Centers
Learn about all our research centers at S&T. Learn more.
Research Funding
Research in the department is funded through external grants and contracts from several federal agencies and private companies including but not limited to: NSF, ISC, CII, Department of Health & Human Services, CDC, NIOSH, Boeing, CAMT, CNS, SATC, Honeywell, Air Force Research Laboratory, NIST, Purdue University, US Department of Education, and Microsoft.
Follow Computer Science